

MSR und Automatisierungs-Technik
Speicherprogrammierbare Steuerung sind das Herzstück einer jeden automatisierten Anlage.
Eine speicherprogrammierbare Steuerung besteht aus einer CPU, die den programmierten Code abarbeitet bzw. Tasks ausführt. Es gibt unterschiedliche Möglichkeiten eine SPS zu programmieren, dies ist normiert in IEC 61131. Um die meiner Meinung nach wichtigsten aufzuzählen:
- Strukturierter Text
- FuP
Am flexibelsten kann man meiner Meinung nach mit strukturiertem Text programmieren.
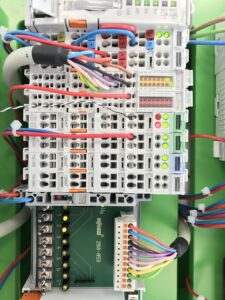
Steckkarten
Eine SPS lässt sich hardwareseitig meistens modular aufbauen. Unterschiedliche Steckkarten erlauben es individuell digitale/analoge Ausgänge bzw. Eingänge zu erweitern oder zu reduzieren. Digitale Eingänge werden häufig dafür verwendet Zustände zu überprüfen (0 oder 1). Dies kann zum Beispiel ein Überspannungs-Schutz sein. Ist dieser ausgelöst wird es von der SPS registriert und ein Alarm oder Ähnliches gemeldet. Analoge Eingänge sind häufig für Sensoren wie Temperaturfühler vorgesehen. Digitale Ausgänge können dafür verwendet werden einen Alarmzustand an ein anderes System zu senden, obwohl dies häufig auch (zum Beispiel an eine Leitzentrale) via Modbus (Kommunikationsverbindung) übermittelt wird. Analoge Ausgänge werden verwendet um Aktuatoren zu steuern wie beispielsweise Ventile oder Frequenzumrichter.
Analoge vs digitale Signale
Um zu verstehen warum es analoge und digitale Eingänge/Ausgänge gibt, muss ein Verständnis dafür vorhanden sein, was der Unterschied zwischen diesen verschiedenen Signaltypen ist. Digitale Signale sind Signale, welche ein Computer verarbeiten kann. Hierbei handelt es sich um diskrete Werte, die durch das aneinander-reihen von Nullen und Einsen gebildet werden. Dabei ist grob-gesagt eine positive Spannung eine Eins und eine negative Spannung eine Null. Physikalische Signale wie Temperatur und Druck sind analoge Signale, die nicht abgehakt auftreten sondern als kontinuierliches Signal.
Beispiel: An einem Temperatur-Sensor wird eine Spannung angelegt. Im Sensor befindet sich ein PTC oder NTC Widerstand. Der Widerstand verändert sich proportional zu der jeweiligen Temperatur. Es kommt zu einem messbar-unterschiedlichem Spannungsabfall am Sensor.
Signalumwandlung
AD-Wandler oder DA-Wandler sind die Schnittstelle zwischen der analogen und der digitalen Domain. Bei einem analogen Eingangs-Signal wie das Beispiel mit dem Temperatur-Sensor, muss die Spannung umgewandelt werden, damit der Computer den Zahlenwert lesen kann. Da ein Computer nur diskrete Werte verarbeiten kann wird das Signal mit einer bestimmten Abtastfrequenz abgetastet.
Bei einem DA-Wandler verhält es sich genau umgekehrt. Ein digitales Signal, zum Beispiel eine Stellgröße für einen Frequenzumformer, muss in ein kontinuierliches analoges Signal umgewandelt werden, wie eine Spannung zwischen 0 und 10 V. Die Wandlung von diskreten zu kontinuierlichen Werten geschieht durch Glättungs-Filter.
Modbus
- Modbus RTU (Seriell): Überträgt Daten binär über RS-232 oder RS-485. Es ist robust, kostengünstig und ideal für einfache Feldgeräte über längere Distanzen.
- Modbus TCP (Ethernet): Nutzt Standard-Ethernet-Kabel und das TCP/IP-Protokoll. Es ist deutlich schneller als RTU und ermöglicht die Einbindung in moderne IT-Infrastrukturen.

- Datenstruktur: Modbus arbeitet primär mit Registern (16-Bit-Werte) und Coils(einzelne Bits/Schaltausgänge).
Neben Modbus gibt es spezialisierte Protokolle, die je nach Anforderung (Geschwindigkeit, Sicherheit, Komplexität) gewählt werden:
-
- PROFINET / PROFIBUS: Die Standards im Siemens-Umfeld für Echtzeit-Kommunikation und schnelle E/A-Zyklen.
- EtherCAT: Bekannt für extrem hohe Geschwindigkeiten, oft in der Antriebstechnik (Servomotoren) eingesetzt.
- EtherNet/IP: Nutzt Standard-Ethernet-Hardware.
- OPC UA: Es bietet im Gegensatz zu Modbus eine starke Verschlüsselung und semantische Datenmodelle (Daten haben Namen und Typen, nicht nur Adressen).
- MQTT: Ein Protokoll für das Internet der Dinge (IoT), um Daten einfach in Cloud-Systeme zu übertragen.
Linear vs nichtlineare Regelung
- Lineare Regelung: Das Systemverhalten folgt dem Superpositionsprinzip (doppelter Input führt zu doppeltem Output). In der Praxis werden Prozesse oft um einen Arbeitspunkt herum linearisiert, um bewährte Werkzeuge wie den PID-Regler(Proportional-Integral-Derivative) einzusetzen.
- Nichtlineare Regelung: Reale physikalische Effekte wie Reibung, Sättigung oder quadratische Abhängigkeiten (z. B. Luftwiderstand) machen Systeme nichtlinear. Wenn eine einfache Linearisierung nicht ausreicht, kommen Verfahren wie Gain Scheduling(Umschalten zwischen verschiedenen Regler-Parametern) oder die Ljapunow-basierte Regelung zum Einsatz.
Modellbasierte Regelung
- Modellbasierte Regelung: Hierbei dient ein mathematisches Modell der Regelstrecke dazu, den Regler optimal auf die Strecke abzustimmen. Dies verbessert die Performance gegenüber rein empirisch eingestellten Reglern ma.
- Modellprädiktive Regelung (MPC): Der Regler berechnet auf Basis eines Modells und unter Berücksichtigung von Grenzwerten (z. B. maximale Ventilstellung) die optimalen Stellgrößen für einen zukünftigen Zeitraum.
- Vorteil: Er kann Verzögerungen (Totzeiten) einplanen und komplexe Abhängigkeiten zwischen mehreren Ein- und Ausgängen (MIMO) gleichzeitig optimieren.
- Einsatz: Ursprünglich in der chemischen Industrie und in Raffinerien beheimatet, ist die modellprädiktive Regelung auf SPS heute auch in der schnellen Fertigungstechnik zu finden.
MSR und Automatisierungs-Technik Weiterlesen »
Regelungstechnik